
背景/目标
这只是一个介绍性的分享, 目的在于让大家[自己]简单的了解 3D 画面是如何展现在画面上的
本次分享的内容, 大多数原理性内容来自于: GAMES101 闫令琪 的系列视频 2-6 集
注意: 本分享并没有介绍 OpenGL / WebGL / 渲染管线 的内容
线性代数推荐视频: https://www.bilibili.com/video/BV1ys411472E
需要的线性代数部分的知识
向量 / 矩阵的数学知识
向量
矩阵变换的性质
表示线性变换。所谓的线性变换,可以看成一种几何变换,把一个空间内的几何图形(点线面体)变换到另一个空间,它需要满足
变换前是直线的,变换后依然是直线
直线比例保持不变
变换前的原点,变换后依然是原点
矩阵乘法
(m×n)(n×p) → (m×p) 一个 m×n 的矩阵 × 一个 n×p 的矩阵, 将会得到一个 m×n 的矩阵
m = 3, n = 2, p = 4 → 3 × 4 的矩阵
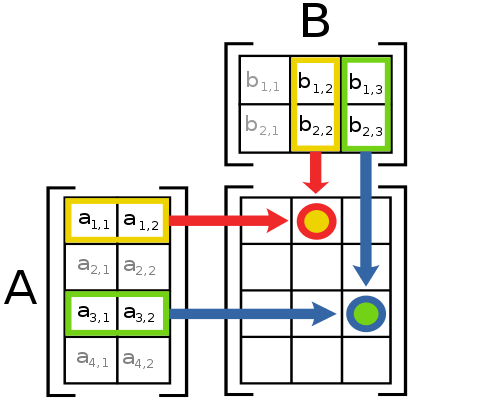
怎么计算矩阵中的内容呢 ?
0, 0 位置的 9 怎么来的: 1 _ 3 + 3 _ 2 = 3 + 6 = 9
1, 0 位置的 19 怎么来的: 5 _ 3 + 2 _ 2 = 15 + 4 = 19
那么根绝规律发现, 如果想计算后矩阵的 第二行第一个[1, 0] 数字
左边的矩阵取第二行: 5 2, 右边的矩阵取第一列3 2, 然后逐个按顺序相乘并加起来
剩下的两个问号[?]位置也就根据上面这个规律来得出:
矩阵乘法的重要作用:
表示线性变换。所谓的线性变换,可以看成一种几何变换,把一个空间内的几何图形(点线面体)变换到另一个空间,它需要满足
变换前是直线的,变换后依然是直线
直线比例保持不变
变换前的原点,变换后依然是原点
可以用线性变换来实现空间中的旋转、缩放、翻转等各种操作
我们可以用线性变换来实现空间中的旋转、缩放、翻转等各种操作
| 单位矩阵 Identity | 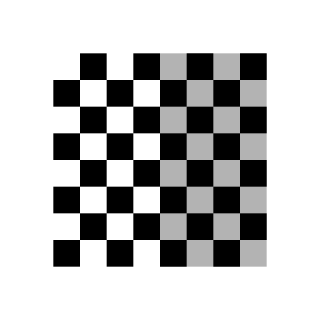 |
|
| 缩放 Scale | 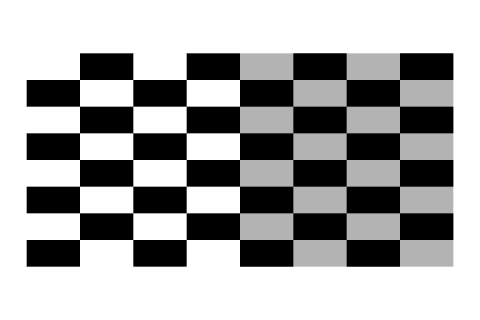 |
|
| 翻转 Reflection | 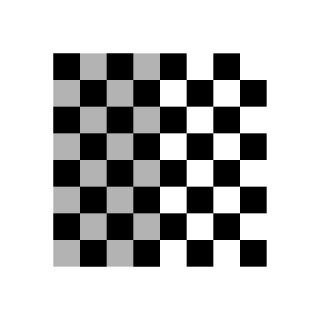 |
|
| 旋转 Rotate | 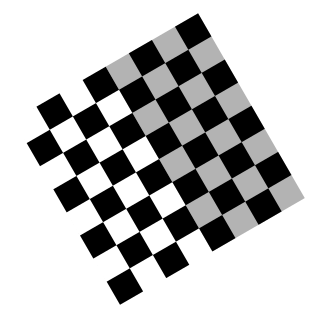 |
|
| 斜切 Shear | 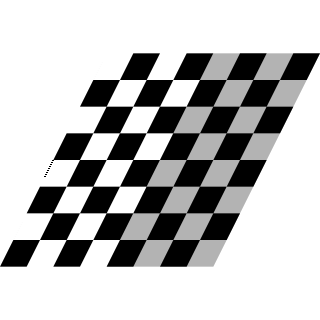 |
内容引自[有改动]: affine transformation
举个例子
将一个向量[列向量]缩放到 2 倍, 那么矩阵中的 S = 2, 现在有一个向量(3, 2)
m = 2, n = 2, p = 1 → 2 × 1 的矩阵
最终得到矩阵
问题?
矩阵变换好像不能表示平移
仿射变换 和 齐次坐标
内容引自: https://www.zhihu.com/question/20666664/answer/157400568
仿射变换
可以简单理解为 仿射变换 = 线性变换 + 平移
仿射变换带来的问题是: 非线性变换, 那么如何让平移变成线性变换?
齐次坐标 Homogeneous
将坐标系维度+1 在高一个维度使用线性变换来表示位移
举个例子
我们希望将点(3, 2), x 和 y 分别移动+2 个位置得到 (5, 4)
首先我们将向量变为列向量, 并且维度+1 得到
加入一个单位矩阵
计算
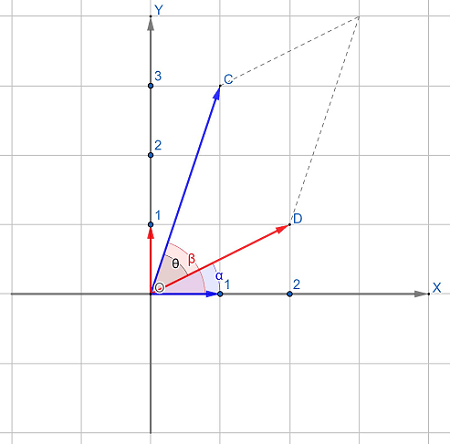
点乘
- 找到两个向量的夹角
- 找到向量的投影
- 两个向量前与后的关系
- 计算平行四边形/三角形的面积
叉乘
- 两个向量左和右的关系
- 判断一个点在凸边型内还是外
- 得到一个和两个向量都垂直的向量
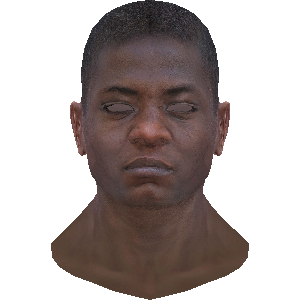
3D 模型是什么样的
如何表达一个 3d 模型
3d 模型文件[obj]中, 会哪些数据
1 | v 0.085564 -0.187462 -0.081385 |
v: 顶点
vt: UV 坐标
vn: 法线
f: 面, v/t/n 索引[顶点/uv/法线]
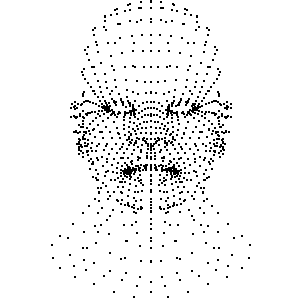
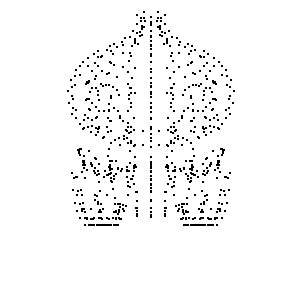
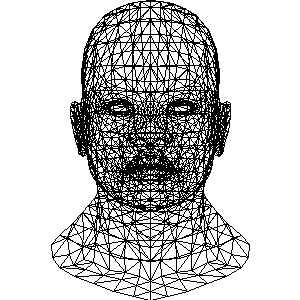
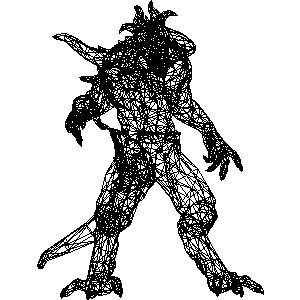
不依赖任何 OpenGL 和 WebGL 的情况下, 渲染一个 3D 模型
将顶点位置找出来, 并绘制
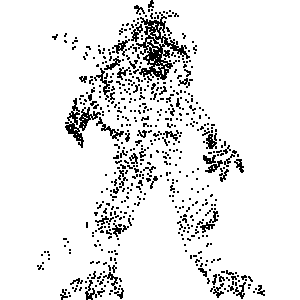
加入绕 Y 轴旋转
将[三角形]找出来, 将三角形相互连起来
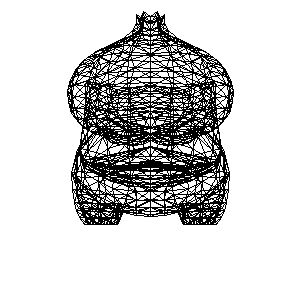
加入绕 Y 轴旋转
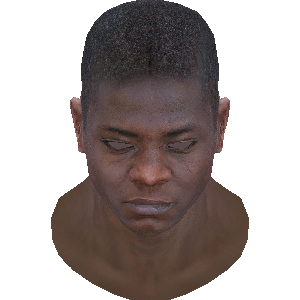
着色
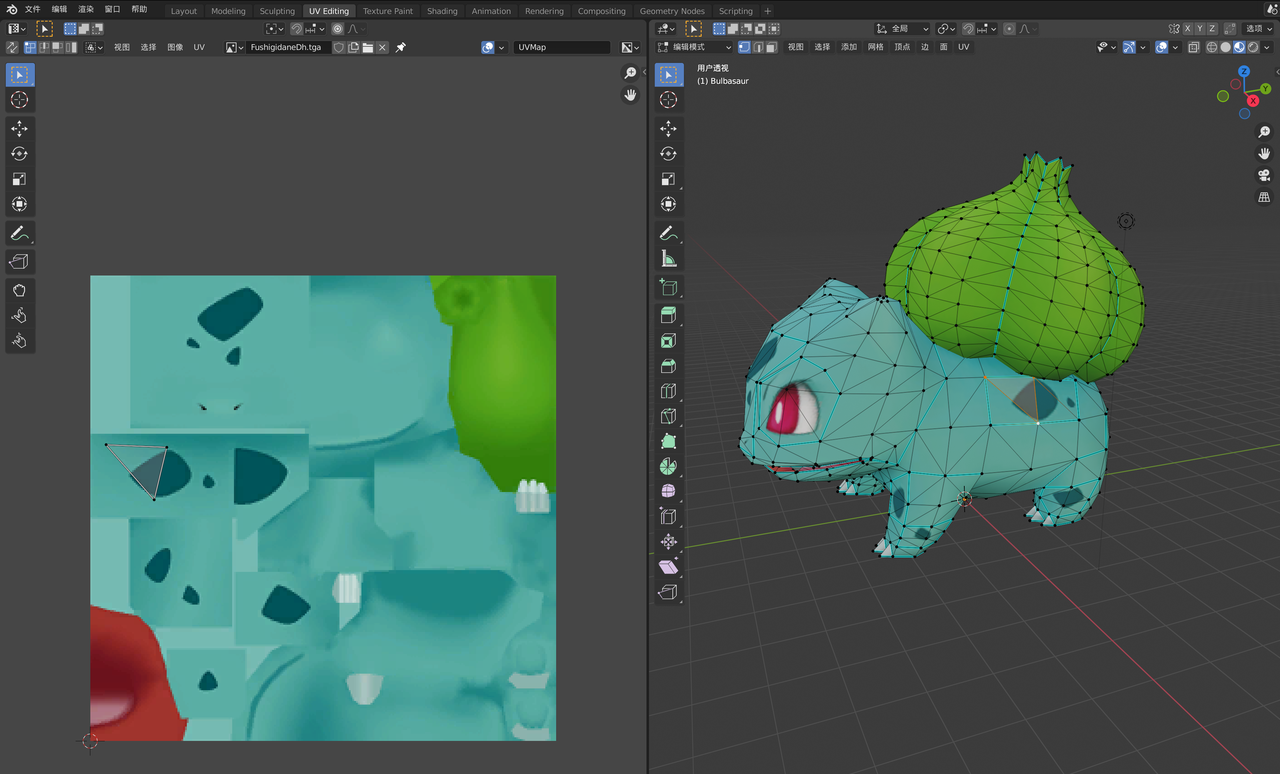
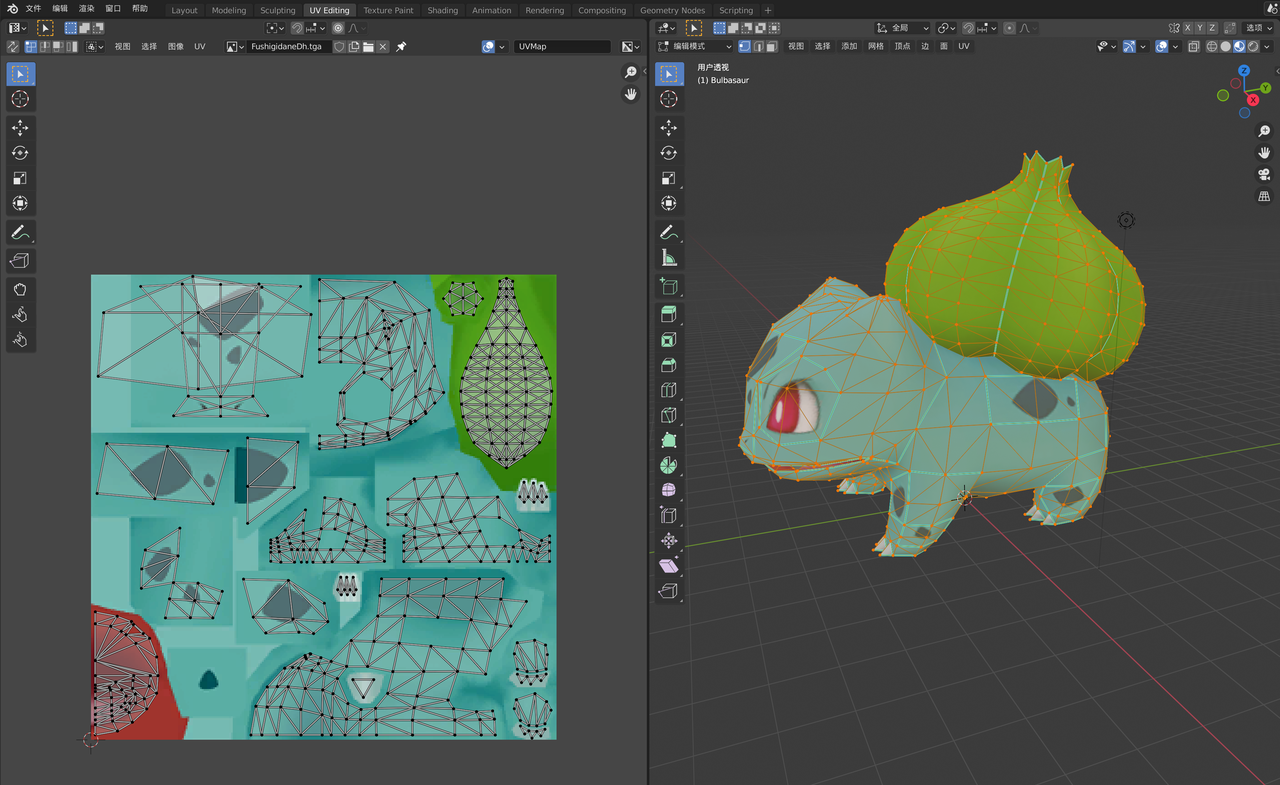
UV 贴图




模型中三角形和**UV**贴图的映射关系
截图来自Blender软件
光栅化
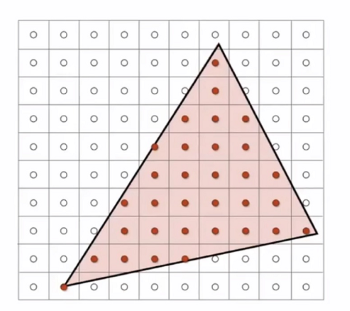
重心坐标 插值 / 判断内外[点是否在三角形内]
重心坐标, 不仅可以用来判断像素点是否在三角形内,还能利用这个重心坐标进行插值
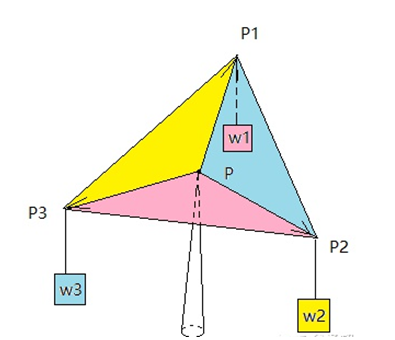
α = 粉红色的三角形面积 / 总面积 β = 黄色的小三角形面积 / 总面积 γ = 蓝色的小三角形面积 / 总面积
1 | x1, y1, x2, y2, x3, y3 = 三角形的三个顶点位置 |
深度测试[前与后的关系]
如果没有深度测试, 可能会导致后面的三角形渲染在前面, 如左图


渲染结果



摄像机
模型可以自己旋转
也可以摄像机围绕着模型旋转
相对运动问题
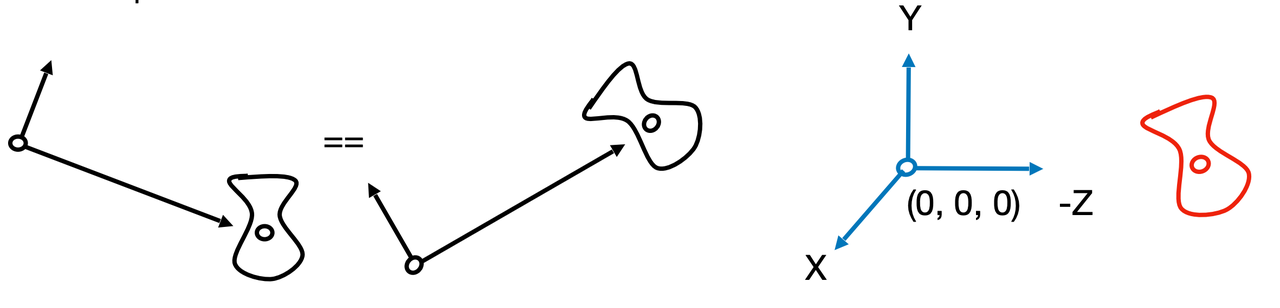
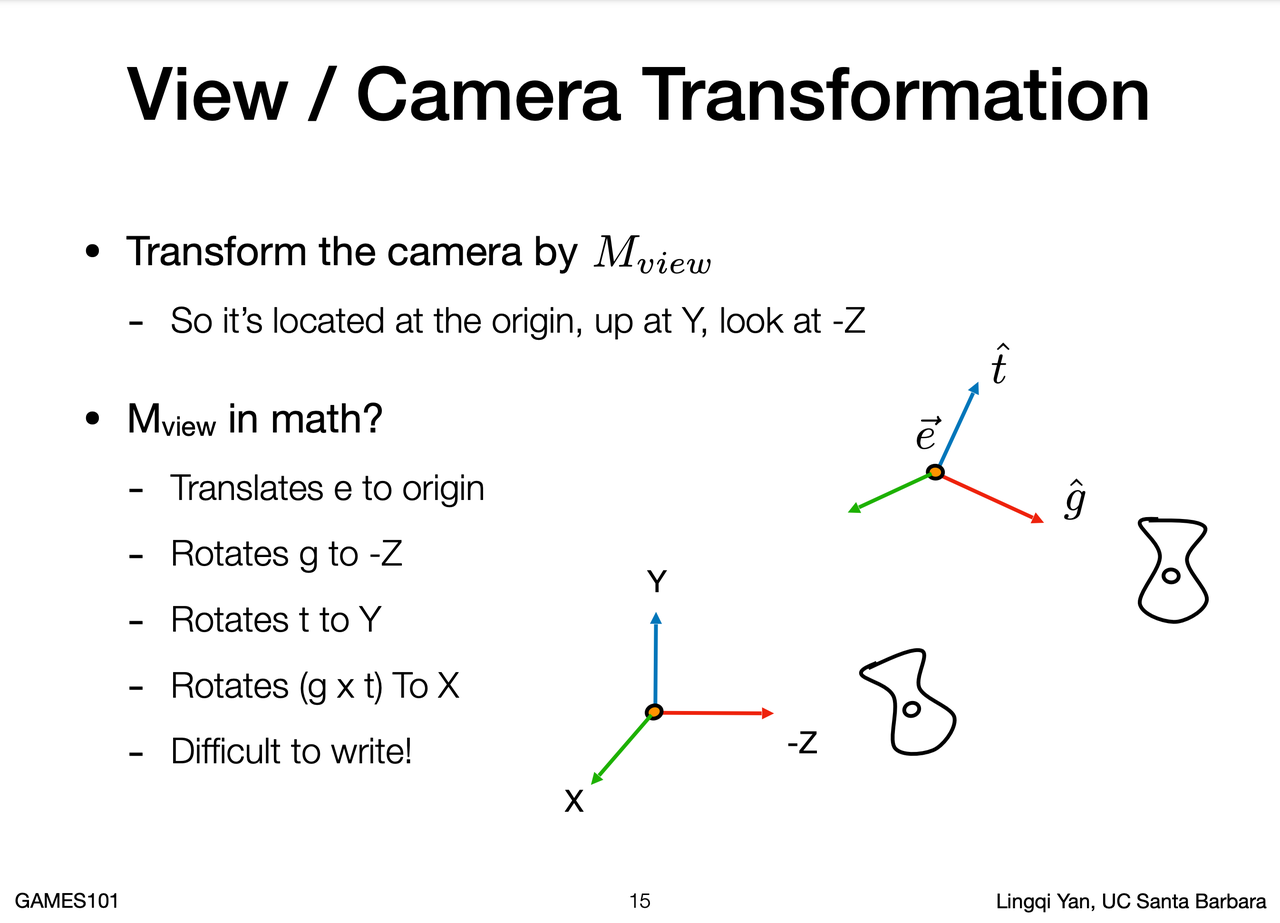
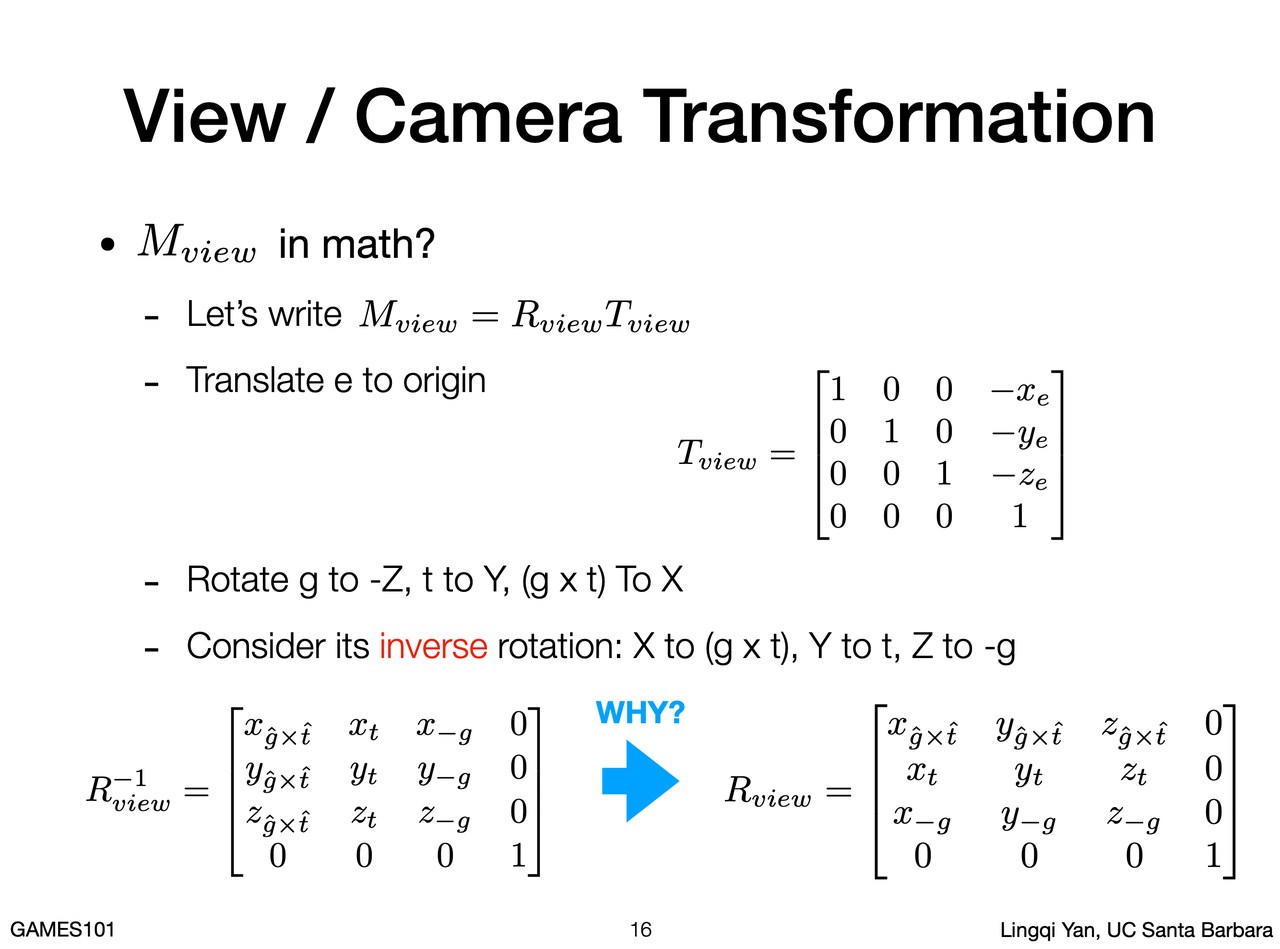
引用自: https://sites.cs.ucsb.edu/~lingqi/teaching/resources/GAMES101_Lecture_04.pdf
抬高摄像机的高度




旋转的对比
注:
左图: 模型自身旋转
中图: 摄像机围绕模型旋转
右图: 摄像机俯视模型旋转
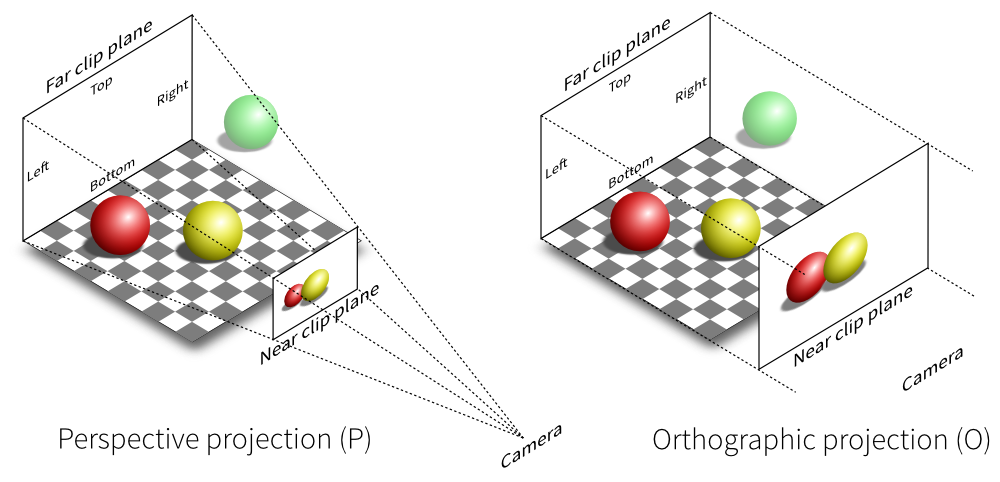
正交/透视
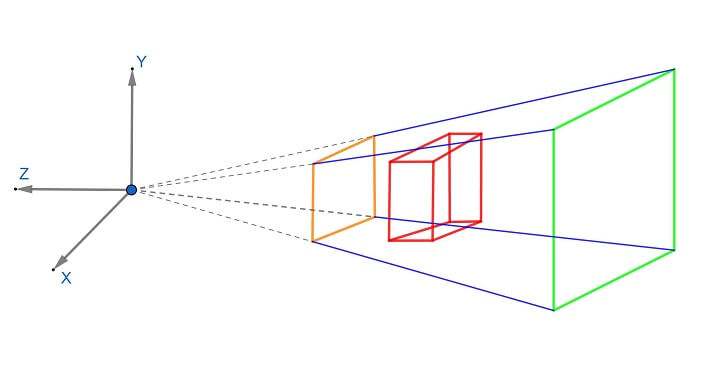
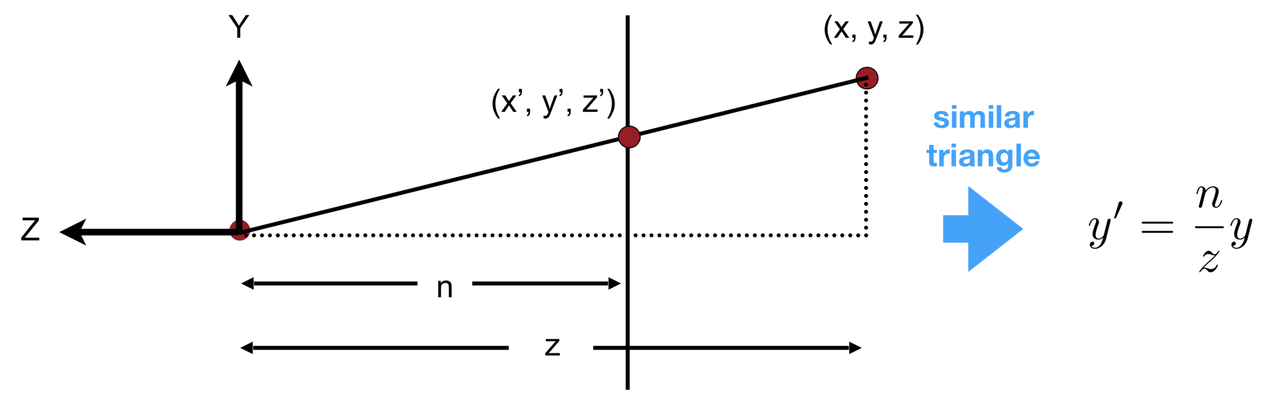
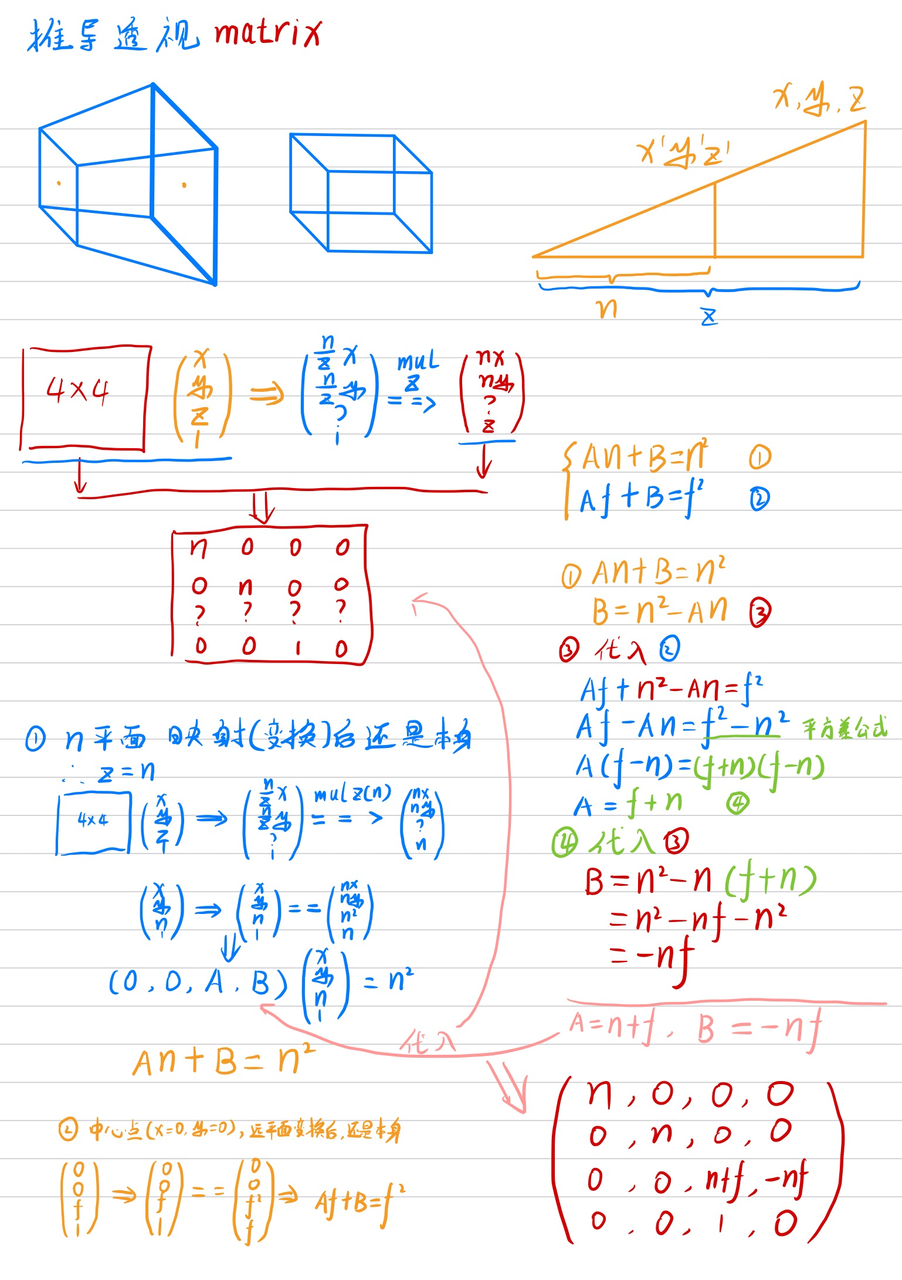
透视矩阵:
透视矩阵[近大远小]

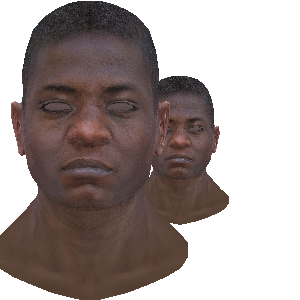
注:
左图: 正交投影
中图: 透视投影
左图和右图, 模型摆放位置是一样的
右图: 透视投影, 修改模型位置的动画
透视修正[重心坐标问题]

我们会发现 地板纹理 稍微有点问题, 因为光栅化计算深度插值的时候
1 | v0, v1, v2 := 三角形的三个顶点坐标 |
示意图:

对比正交投影和透视投影中红色线段和蓝色线段对应的比例值

举例: 线段 AB, 投影到 A'B', A'B'的中心是 x=0 的位置, 但是映射到 AB 中, 并不是中心点, 所以插值后得到了一个错误的结果
矫正透视
1 | // 计算重心坐标 alpha, beta, gamma |
矫正结果对比图


成果:

v1.5.2